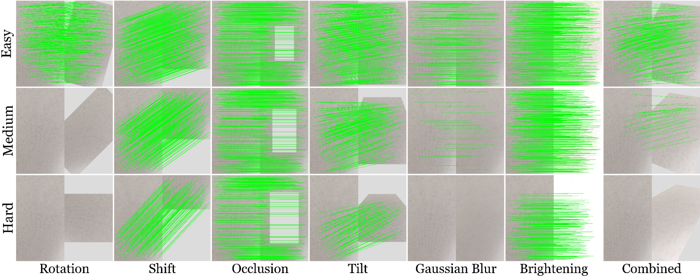
Inlier correspondences on low-texture planar scenes across transformations and difficulty levels.
Overview
Low-texture environments remain a practical challenge for modern indoor visual localization pipelines. In indoor scenarios such as service robotics, mobile augmented reality, and minimally invasive medical imaging, large homogeneous, weakly structured, or repetitive surfaces (e.g., walls, floors, tiled patterns, ceilings, or uniform tissue regions) can lead to unstable feature matching and degraded geometric estimation.
LoTex is an empirical study of feature matching methods under low-texture planar conditions. Instead of focusing on aggregate benchmark scores or leaderboard-style comparisons, the study examines how matching pipelines behave under controlled geometric and photometric transformations that commonly occur in real-world data acquisition.
By analyzing degradation patterns and failure modes, LoTex highlights behaviors that may be obscured by standard evaluation protocols based solely on averaged performance metrics. The goal is not to rank methods, but to better understand their stability characteristics under challenging but realistic conditions.

Representative low-texture environments across indoor robotics, consumer AR, and medical imaging applications where visual correspondences become less stable.
Data and transformations
Dataset
The analysis is based on 250 real images of low-texture planar surfaces, including weakly textured regions, repetitive patterns, and micro-textured materials.

Source images.
Transformations
A controlled set of geometric and photometric transformations is applied at three difficulty levels (Easy, Medium, Hard) to isolate specific degradation factors while preserving known ground-truth geometry. Each source image is paired with synthetically transformed variants using known homographies.
The transformations include rotation, zoom in, zoom out, shift, occlusion, tilt (horizontal perspective), pan (vertical perspective), Gaussian blur, motion blur, darkening, brightening, and a combined transformation designed to approximate realistic camera motion.
In total, the evaluation covers 9,000 image pairs (250 source images × 12 transformation types × 3 difficulty levels).
Applied geometric and photometric transformations.
Models
LoTex evaluates 17 representative feature matching methods spanning classical pipelines, learned detector–descriptor systems, dense or global matching approaches, and geometry-aware architectures. While not exhaustive, this set covers a broad range of widely used paradigms and is sufficient to expose systematic failure modes on low-texture planar scenes.
All methods are implemented using a unified backend based on Image Matching WebUI, ensuring consistent feature extraction, matching, and geometric verification across models.
Evaluated methods:
- MASt3R
- DUSt3R
- OmniGlue
- RoMa
- XFeat (Sparse)
- XFeat + LightGlue
- ALIKED + LightGlue
- DKM
- ASpanFormer
- LoFTR
- DISK + LightGlue
- SuperPoint + LightGlue
- SuperPoint + SuperGlue
- D2-Net
- R2D2
- ORB
- SIFT
All models are evaluated using default pretrained weights, without task-specific tuning. Where applicable, a global cap of 2000 keypoints per image is enforced to improve comparability across methods.
Metrics
Evaluation focuses on homography-based robustness and failure behavior. The reported metrics include:
- Homography Reprojection Error (HRE)
- Success Rate at fixed thresholds (SR@τ), defined as the fraction of image pairs whose HRE falls below a given pixel threshold; pipeline failures at any stage contribute a value of zero
- Runtime, measured as the average inference time per image pair
- Auxiliary diagnostics, including inlier statistics and detailed failure metadata
Results
Robustness across transformations
SR@10 is computed over all evaluated image pairs. The results reveal pronounced robustness gaps under rotations, blur, and combined degradations that approximate realistic camera motion.
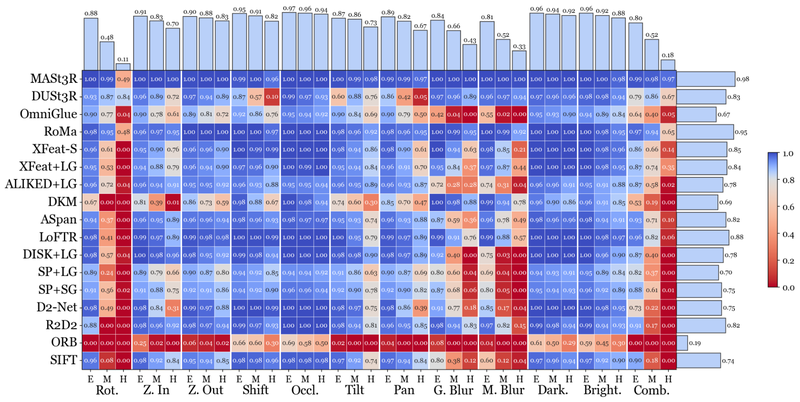
Robustness heatmap (SR@10); the color scale is non-linear, with the neutral color corresponding to SR@10 = 0.8.
Failure and degradation analysis
Homography outcomes are decomposed into accuracy regimes and explicit failure modes, distinguishing gradual geometric degradation from abrupt pipeline breakdowns. Methods exhibit qualitatively different failure behaviors, which has important implications for downstream systems that rely on predictable geometric performance.
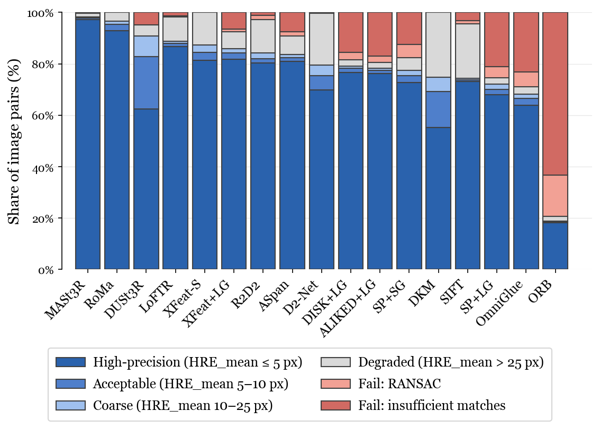
Distribution of geometric accuracy and pipeline failure modes.
Robustness versus efficiency
The trade-off between robustness and computational cost is analyzed by plotting success rate against inference time. Runtime is reported within the unified LoTex evaluation setting and is not intended to reproduce published speed benchmarks.
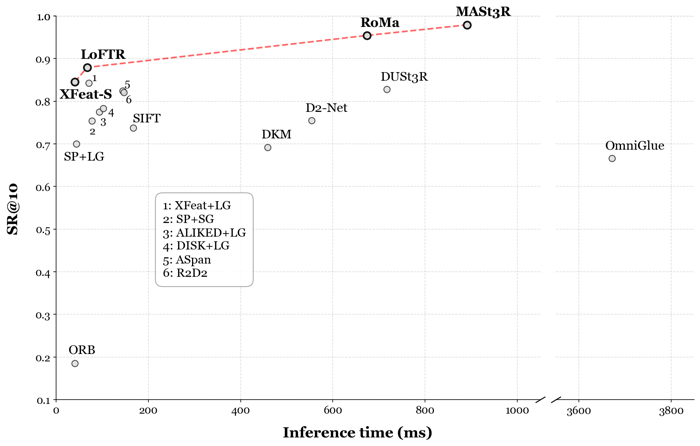
Robustness versus efficiency (Pareto analysis).
Summary
LoTex demonstrates that progress on standard feature matching benchmarks does not necessarily translate to robustness on low-texture planar scenes. The analysis highlights the value of failure-aware evaluation protocols that explicitly expose degradation mechanisms, rather than relying solely on aggregate success metrics.