Сейчас на сайте доступен полный гайд по реконструкции реальных объектов с помощью 3D Gaussian Splatting. В нём разобраны захват изображений, оценка поз камеры, обучение модели и постобработка. Всё делается на Windows и на базе инструментов с открытым исходным кодом.
В будущем будут добавлены новые туториалы.
1 - От реального объекта к 3D Gaussian Splatting модели с помощью инструментов с открытым исходным кодом
Пошаговый гайд по съёмке реальных объектов (или физических продуктов) и реконструкции на Windows с использованием COLMAP, gsplat и SuperSplat.
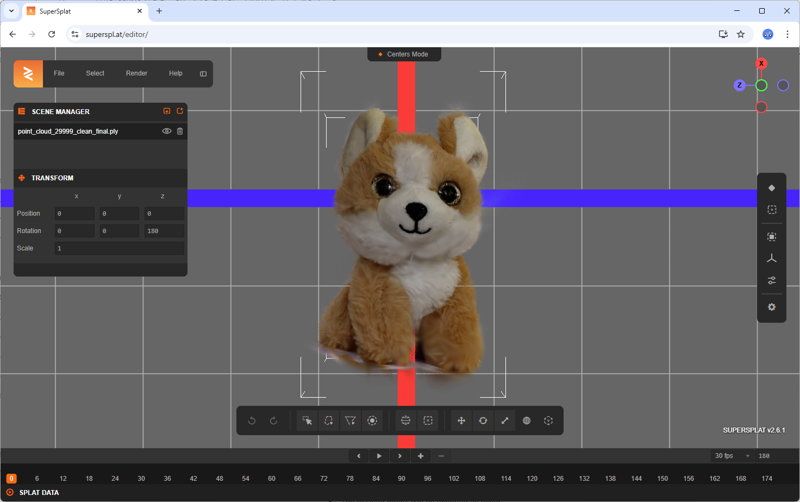
Реальная плюшевая игрушка (слева) и её реконструированная 3D Gaussian Splatting модель (справа).
Gaussian Splatting — это современная техника для синтеза новых ракурсов (novel view synthesis). Она реконструирует сцену, размещая в пространстве тысячи небольших 3D‑гауссиан и оптимизируя их внешний вид так, чтобы он согласовывался с входными изображениями. Этот подход особенно хорошо передаёт тонкие и «мягкие» детали (например, мех или тканевые текстуры), которые часто плохо восстанавливаются традиционными методами, основанными на поверхностях/мешах.
Туториал демонстрирует полный пайплайн на примере реальной плюшевой игрушки. Он включает следующие шаги:
Съёмка исходных изображений
Оценка поз камер с помощью COLMAP
Обучение модели с помощью gsplat
Редактирование и визуализация результатов в SuperSplat
Пример показывает, как получить воспроизводимый результат, используя только инструменты с открытым исходным кодом, настроенные под Windows.
Этот подход особенно хорошо подходит для сканирования физических продуктов или небольших реальных объектов, поэтому он полезен для задач визуализации продукта, оцифровки объектов и создания 3D‑контента.
О gsplat
В этом туториале используется репозиторий gsplat для 3D Gaussian Splatting. По сравнению с оригинальной реализацией авторов (graphdeco-inria/gaussian-splatting), gsplat даёт несколько практических преимуществ:
Более быстрое обучение, меньший расход памяти и поддержка больших сцен
Функции вроде multi‑GPU, рендеринга глубины и anti‑aliasing
Интеграция с экосистемой Nerfstudio (общие инструменты и пайплайны)
Лицензия Apache 2.0, допускающая коммерческое использование
Активная поддержка и использование в проектах с открытым исходным кодом
О COLMAP
COLMAP оценивает позы камер и строит разреженную реконструкцию по входным изображениям. Эти результаты используются для обучения 3D Gaussian Splatting модели. Windows‑версия COLMAP включает графический интерфейс и инструменты командной строки.
Примечание: gsplat является частью проекта Nerfstudio, в котором есть обёртка над COLMAP (ns-process-data), запускающая COLMAP с параметрами по умолчанию. Часто этого достаточно, но для некоторых наборов данных нужны нестандартные настройки. В одном из разделов ниже показано, как менять ключевые параметры, если настройки по умолчанию не работают.
Примечание: Аналогичные пайплайны можно строить и с помощью RealityCapture, Agisoft Metashape или Autodesk ReCap Pro. В этом туториале фокус на бесплатном и воспроизводимом процессе на базе COLMAP.
О SuperSplat
SuperSplat Editor это инструмент с открытым исходным кодом, работающий в браузере, для просмотра, редактирования и оптимизации 3D Gaussian Splatting моделей. Он поддерживает:
Просмотр результата
Очистку артефактов
Обрезку и объединение моделей
Лёгкие правки без переобучения
SuperSplat также можно установить как Progressive Web App (PWA) для более быстрого доступа и интеграции «как приложение».
Почему Windows
Туториал ориентирован на Windows, потому что эта ОС широко используется начинающими, студентами и техническими пользователями. При этом многие инструменты с открытым исходным кодом разрабатываются под Linux, а пользователи Windows часто сталкиваются с дополнительными сложностями при установке из‑за платформенных различий.
Вопросы по установке и запуску COLMAP и gsplat на Windows регулярно появляются на форумах, в GitHub Issues и в сообществах. Этот туториал даёт понятный пошаговый процесс под Windows, чтобы сделать современные методы 3D‑реконструкции более доступными.
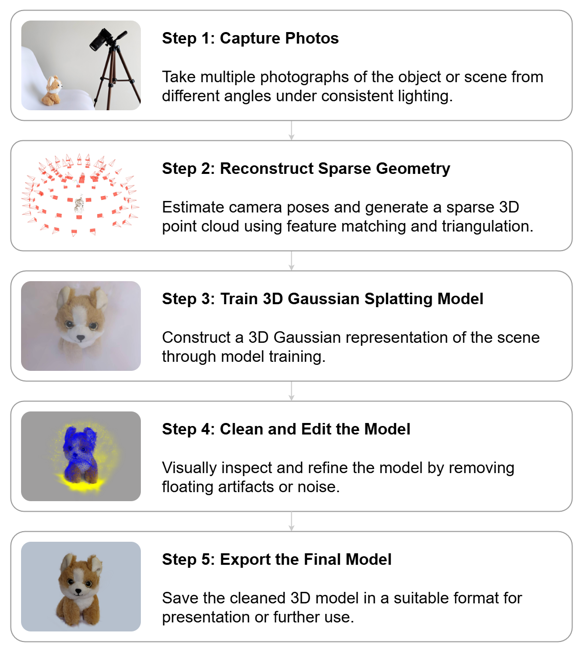
Обзор пайплайна
Туториал проходит полный пайплайн построения 3D Gaussian Splatting модели из реальных изображений. Процесс включает четыре основных этапа:
Съёмка изображений
Калибровка/оценка поз камер и построение разреженного облака точек в COLMAP
Обучение модели в gsplat
Финальная правка и визуализация в SuperSplat
Схема пайплайна 3D Gaussian Splatting.
Далее каждый шаг разобран подробно. Если вас интересует только обучение, визуализация или другой этап, можно перейти сразу в нужный раздел.
1.1 - Установка
Этот туториал разрабатывался и проверялся на Windows 11. Большинство шагов также применимы к Linux, но есть различия, которые будут разобраны в отдельном гайде.
Рекомендуемая среда
Для эффективного обучения и воспроизводимости рекомендуется система со следующей конфигурацией:
Hardware
GPU NVIDIA с поддержкой CUDA
Software
Windows 11
Git
Miniconda or Anaconda
Microsoft Build Tools for Visual Studio 2022
Python 3.10
CUDA Toolkit 12.6 (или совместимая версия; устанавливается отдельно)
COLMAP (с поддержкой CUDA)
gsplat
SuperSplat
Примечание: Небольшие отличия в версиях ПО или драйверов CUDA могут потребовать мелких правок.
Примечание: CUDA Toolkit нужно устанавливать отдельно от GPU‑драйвера, чтобы включить GPU‑ускорение. Без Toolkit инструменты вроде PyTorch не увидят поддержку CUDA. Инструкции и совместимость см. в документации CUDA Toolkit.
Распакуйте содержимое ZIP‑файла в удобное место, например:
C:\Tools\colmap
В туториале используется <COLMAP_PATH> как плейсхолдер пути установки COLMAP. Замените его на фактический путь в вашей системе.
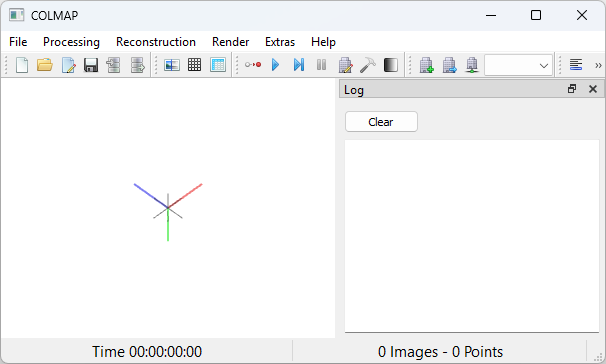
Запустите COLMAP
Запустить COLMAP GUI можно одним из способов:
Вариант A
Дважды щёлкните COLMAP.bat в распакованной папке.
Вариант B
Откройте Command Prompt и выполните:
<COLMAP_PATH>\COLMAP.bat gui
Замените <COLMAP_PATH> на фактический путь установки.
Проверьте установку
Если всё установлено корректно, COLMAP GUI откроется без ошибок. Вы увидите главное окно, как на рисунке ниже:
Рисунок 3. Главное окно COLMAP GUI при запуске.
Альтернативные способы установки
В этом туториале используется предсобранный Windows‑релиз. Другие варианты, включая сборку из исходников или установку через пакетные менеджеры на Linux/macOS, описаны в официальной инструкции:
https://colmap.github.io/install.html
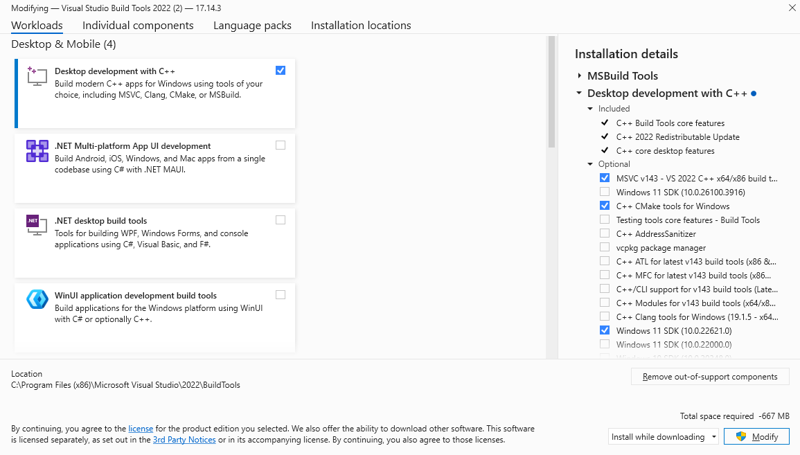
1.1.2 - Установка Microsoft Build Tools
Microsoft Build Tools for Visual Studio предоставляет компилятор C++ и связанные инструменты, необходимые для сборки C++‑проектов на Windows. Это требуется, чтобы собрать gsplat из исходников.
Замените <DATA_PATH> и <OUTPUT_PATH> на корректные пути. Если всё настроено правильно, скрипт стартует и покажет прогресс обучения.
Известная проблема на Windows: ошибка парсинга бинарников pycolmap
На Windows при запуске скрипта обучения может встретиться ошибка вида:
Error with pycolmap:
...
num\_cameras = struct.unpack('L', f.read(8))\[0]
Эта ошибка вызвана несоответствием логики struct.unpack в Windows‑сборке. На момент написания исправление ещё не было вмержено в официальный репозиторий pycolmap. Подробности см. в PR: https://github.com/rmbrualla/pycolmap/pull/2
В качестве обходного пути удалите исходный пакет и установите патч‑версию из форка сообщества:
gsplat поддерживает разные форматы входных данных через механизмы подготовки датасетов в Nerfstudio. В этом туториале в качестве входа используется набор отдельных фотографий.
Практики съёмки зависят от типа сцены. Уличные сцены, помещения, люди и небольшие объекты требуют разных подходов. Тем не менее, следующие общие рекомендации подходят для большинства сценариев и помогают улучшить качество результата в 3D Gaussian Splatting.
Общие рекомендации
Используйте ровный мягкий свет
Освещайте сцену равномерным рассеянным светом, чтобы уменьшить тени и блики. Избегайте жёсткого направленного света: он повышает шум и ухудшает качество реконструкции.
Снимайте качественные статичные фото
Фотографии обычно дают лучший результат, чем кадры из видео, потому что меньше смаза (motion blur) и стабильнее экспозиция. Если вы используете видео, снимайте с высоким FPS (минимум 60) при стабильном освещении.
Обеспечьте достаточное перекрытие кадров
Каждое изображение должно перекрываться с соседними ракурсами примерно на 20–30%. Перекрытие критично для сопоставления признаков в Structure‑from‑Motion (SfM). В видео такое перекрытие часто получается автоматически.
Создавайте параллакс перемещением камеры
Между кадрами меняйте физическое положение камеры. Не вращайтесь «на месте» без смещения: это снижает геометрическую информативность и может привести к провалу оценки поз.
Фиксируйте настройки камеры
Используйте ручной фокус и фиксированное фокусное расстояние, чтобы внутренние параметры камеры оставались стабильными. Отключите зум, автофокус и автоэкспозицию.
Избегайте смаза и искажений
Используйте штатив или стабилизатор. Избегайте условий с низкой освещённостью, где требуются длинные выдержки. Проверяйте, что изображения резкие и правильно сфокусированы.
Снимайте сцены с текстурой
В сцене должно быть достаточно текстуры, контрастных границ и деталей, чтобы признаки детектировались стабильно. Плоские, однородные или глянцевые поверхности снижают эффективность SfM.
Сцена должна быть статичной
Не допускайте движения во время съёмки. Движущиеся объекты, люди или изменения освещения мешают оценке поз.
Выбирайте подходящее разрешение
Высокое разрешение повышает детализацию, но увеличивает расход памяти и время обучения. Подберите компромисс между качеством и производительностью.
Снимайте достаточно ракурсов
Для небольших объектов/сцен хорошая отправная точка: 100–250 согласованных кадров. Для более крупных или полностью 360° моделей нужно больше покрытие. Следите, чтобы не «выпадали» зоны вроде нижней части объекта.
Используйте многокамерные установки, если это уместно
Многокамерная установка может ускорить съёмку, фиксируя несколько ракурсов одновременно. Это полезно для динамических сцен или ограниченного по времени процесса.
О датасете из примера
В этом туториале используется 84 входных изображения с разрешением 3000 × 2000, снятых камерой Canon M200 на штативе. Плюшевая игрушка была размещена на стуле, накрытом двумя скреплёнными листами белой бумаги 50 × 70 см, образующими изогнутый фон. Дополнительный лист снизу позволял удобно поворачивать объект во время съёмки, при этом камера оставалась неподвижной для каждого «бубликообразного» обхода.
Фотографии были сделаны в помещении при рассеянном фоновом освещении. На кадрах видны тени и элементы фона. Это сделано намеренно, чтобы смоделировать «реальные» условия и показать, что хороший результат возможен и без студийной постановки света. Освещение было неравномерным, а постобработка отдельных кадров не выполнялась. Это также демонстрирует, как инструменты вроде SuperSplat могут помочь скорректировать яркость и цвет уже после обучения. Цель: стимулировать практическое обучение даже на неидеальных данных.
Примечание: Похожий результат можно получить и с помощью современного смартфона, если освещения достаточно, а камера держится стабильно.
Примечание: Игрушка является личной собственностью автора и используется здесь исключительно для технической демонстрации.
Выбранные входные изображения, использованные для 3D‑реконструкции.
Схема съёмки: плюшевая игрушка, камера на штативе и изогнутый бумажный фон на стуле (слева); предпросмотр в реальном времени на экране камеры во время съёмки (справа).
Наблюдение: Gaussian Splatting и мелкие детали
Плюшевая игрушка выбрана, чтобы продемонстрировать одну из ключевых сильных сторон 3D Gaussian Splatting: способность передавать мягкие и детализированные поверхности. Традиционные меш‑пайплайны часто плохо справляются с материалами вроде меха и дают нереалистичную или неполную геометрию. В отличие от этого, представление сцены набором 3D‑гауссиан лучше сохраняет тонкую текстуру и мелкие вариации.
1.3 - Оценка параметров камеры и разреженного облака точек в COLMAP
COLMAP обрабатывает входные изображения, чтобы оценить внутренние (intrinsics) и внешние (extrinsics) параметры камеры. Также он строит разреженное облако точек, которое служит геометрической основой для обучения 3D Gaussian Splatting модели.
В этом туториале COLMAP запускается напрямую из командной строки, чтобы получить полный контроль над извлечением признаков, сопоставлением и триангуляцией. Такой подход позволяет просматривать промежуточные результаты и проще диагностировать проблемы.
Почему не использовать пайплайн Nerfstudio по умолчанию?
В Nerfstudio есть обёртка над COLMAP в виде команды ns-process-data, но она использует параметры по умолчанию, заданные в коде пайплайна. Во многих случаях этого достаточно, но на реальных сценах нередко требуются ручные настройки, иначе реконструкция может не получиться.
Например, при обработке датасета из примера через эту обёртку COLMAP зарегистрировал только 2 изображения из 84:
Starting with 84 images
Colmap matched 2 images
COLMAP only found poses for 2.38% of the images. This is low.
This can be caused by a variety of reasons, such as poor scene coverage,
blurry images, or large exposure changes.
Nerfstudio рекомендует увеличить перекрытие изображений или улучшить качество съёмки. Это полезные рекомендации, но во многих случаях можно получить рабочий результат, просто настроив параметры COLMAP напрямую.
В следующих разделах приведены точные шаги командной строки, которые использовались для успешной реконструкции этого датасета.
Операции COLMAP
Процесс в COLMAP состоит из трёх основных стадий:
Извлечение признаков (feature extraction): детектирует устойчивые визуальные признаки (например, ключевые точки SIFT) на каждом изображении.
Сопоставление признаков (feature matching): находит надёжные соответствия между признаками на парах изображений.
Имена файлов вроде image_0001.jpg приведены только для примера. Последовательные имена удобны, но строгих требований к именованию нет.
images_2 и images_4 содержат уменьшенные в 2× и 4× версии исходных изображений. Они используются при обучении с --data_factor 2 или --data_factor 4. При необходимости можно добавить дополнительные папки (например, images_8/).
sparse/0/ содержит результат разреженной реконструкции COLMAP. Если COLMAP построит несколько несвязанных моделей, появятся дополнительные подпапки sparse/1, sparse/2 и т. д.
colmap.db — база данных, создаваемая на этапах извлечения и сопоставления признаков. В ней хранятся ключевые точки, соответствия и оценка внутренних параметров камеры.
Датасет из примера с этой структурой находится в репозитории: datasets/plush-dog. Его можно использовать для тестов или как референс при подготовке своих сцен.
1.3.1 - Запуск COLMAP с параметрами по умолчанию
Предупреждение
В этом разделе показано, как запустить COLMAP с параметрами по умолчанию. На датасете из примера такая конфигурация не даёт валидной реконструкции, хотя на других данных может сработать.
Если вас интересует только конфигурация, которая работает с датасетом из туториала, переходите сразу к разделу Запуск COLMAP с настроенными параметрами.
Задайте пути и создайте выходные папки
Сначала задайте нужные переменные окружения и создайте выходную папку:
set COLMAP_PATH=<Путь к установленному colmap.bat>
set DATA_PATH=<Путь к папке датасета, например plush-dog>
set IMAGE_PATH=%DATA_PATH%\images
set DB_PATH=%DATA_PATH%\colmap.db
set SPARSE_PATH=%DATA_PATH%\sparse
mkdir %SPARSE_PATH%
Команда выполняет сопоставление признаков для всех пар изображений с настройками по умолчанию.
Справка по параметрам:
--database_path: путь к базе COLMAP с извлечёнными признаками
--SiftMatching.use_gpu 1: включает GPU‑ускорение для сопоставления
Exhaustive matcher сравнивает признаки для каждой возможной пары изображений. Он подходит для небольших и средних датасетов (до нескольких сотен изображений). Для больших датасетов он становится вычислительно дорогим, поскольку число пар растёт квадратично.
COLMAP также поддерживает стратегии сопоставления, лучше подходящие для больших датасетов: sequential matching, spatial matching и vocab tree matching. Подробнее см. в документации COLMAP.
--database_path: путь к базе COLMAP с признаками и соответствиями
--image_path: путь к папке с входными изображениями
--output_path: путь для сохранения моделей. Каждый результат будет в подпапке с номером (например, sparse/0)
Пример вывода и неудачного запуска
В некоторых случаях, включая датасет из этого туториала, COLMAP может не справиться с настройками по умолчанию. Сопоставление признаков может завершиться, но реконструкция может упасть на этапе инкрементального мэппинга (incremental mapping).
Пример лога при неудачном запуске:
Loading database
Loading cameras...
1 in 0.000s
Loading matches...
214 in 0.001s
Loading images...
84 in 0.008s (connected 84)
Loading pose priors...
0 in 0.000s
Building correspondence graph...
in 0.005s (ignored 0)
Elapsed time: 0.000 [minutes]
Finding good initial image pair
Initializing with image pair #57 and #83
Global bundle adjustment
Registering image #56 (3)
=> Image sees 52 / 299 points
Retriangulation and Global bundle adjustment
Registering image #84 (4)
=> Image sees 68 / 257 points
...
Registering image #43 (21)
=> Image sees 30 / 144 points
=> Could not register, trying another image.
Retriangulation and Global bundle adjustment
Finding good initial image pair
=> No good initial image pair found.
Finding good initial image pair
=> No good initial image pair found.
Повторяющееся сообщение "No good initial image pair found" означает, что COLMAP не смог найти геометрически корректную пару изображений для инициализации реконструкции. Это может произойти как при старте первой 3D‑модели, так и при попытках начать новую модель после того, как не удалось зарегистрировать дополнительные изображения.
Такие проблемы обычно связаны с тем, что совпадения признаков слабые, редкие или неравномерно распределены по датасету. Чтобы улучшить инициализацию, попробуйте настроить параметры извлечения и сопоставления признаков и повысить качество начальных соответствий.
Если настройка параметров не помогает, попробуйте снять больше кадров с большим перекрытием или экспериментируйте с альтернативными инструментами реконструкции.
В этом разделе показано, как настройка параметров COLMAP может улучшить реконструкцию. Шаги по заданию путей и созданию выходных папок такие же, как в разделе Запуск COLMAP с параметрами по умолчанию, поэтому здесь они не повторяются.
По сравнению с конфигурацией по умолчанию здесь добавлен параметр --SiftMatching.guided_matching 1, который включает guided matching (сопоставление с геометрическими ограничениями). Guided matching использует ограничения на базе двухвидовой геометрии (two‑view geometry), чтобы отфильтровать кандидатные соответствия. Это уменьшает число выбросов и повышает устойчивость, особенно в сценах со слабой текстурой или ограниченным перекрытием изображений.
Пример вывода:
==============================================================================
Feature matching
==============================================================================
Creating SIFT GPU feature matcher
Generating exhaustive image pairs...
Matching block [1/2, 1/2]
in 1.112s
Matching block [1/2, 2/2]
in 0.435s
Matching block [2/2, 1/2]
in 0.987s
Matching block [2/2, 2/2]
in 0.952s
Elapsed time: 0.059 [minutes]
Loading database
Loading cameras...
1 in 0.001s
Loading matches...
213 in 0.001s
Loading images...
84 in 0.009s (connected 84)
Loading pose priors...
0 in 0.001s
Building correspondence graph...
in 0.009s (ignored 0)
Elapsed time: 0.000 [minutes]
Эти параметры ослабляют несколько порогов COLMAP по умолчанию:
--Mapper.init_min_tri_angle 2 (по умолчанию: 16)
Минимальный угол триангуляции (в градусах). Меньшие значения позволяют триангулировать больше точек, но могут снижать точность.
--Mapper.init_min_num_inliers 4 (по умолчанию: 100)
Минимальное число проверенных соответствий, необходимое для инициализации модели.
--Mapper.abs_pose_min_num_inliers 3 (по умолчанию: 30)
Минимальное число 2D–3D соответствий, необходимое для регистрации нового изображения.
--Mapper.abs_pose_max_error 8 (по умолчанию: 12)
Допустимая ошибка репроекции (в пикселях) на этапе регистрации.
Эти настройки помогают реконструировать сцены, где пороги по умолчанию слишком строгие. Для датасета из примера такие значения позволили получить успешную реконструкцию. Для других данных могут потребоваться другие значения, в зависимости от качества изображений и структуры сцены.
Примечание: Эти параметры подобраны специально под датасет, используемый в туториале. Они не являются универсальными значениями «по умолчанию». Скорее всего, вам придётся подстроить их под свою сцену, качество данных и цели реконструкции.
Пример вывода
При успехе COLMAP покажет последовательную (incremental) регистрацию изображений:
Finding good initial image pair
Initializing with image pair #20 and #39
Global bundle adjustment
Registering image #19 (3)
=> Image sees 110 / 618 points
Retriangulation and Global bundle adjustment
Registering image #1 (4)
=> Image sees 167 / 689 points
...
В логе не должно быть сообщений вида:
=> No good initial image pair found.
Также папка %SPARSE_PATH% (обычно sparse/) должна содержать только одну подпапку, как правило 0.
Если появляются несколько подпапок (например 1 или 2), это означает, что COLMAP построил несколько несвязанных 3D‑сцен. Обычно это признак того, что не все изображения удалось зарегистрировать в одну модель.
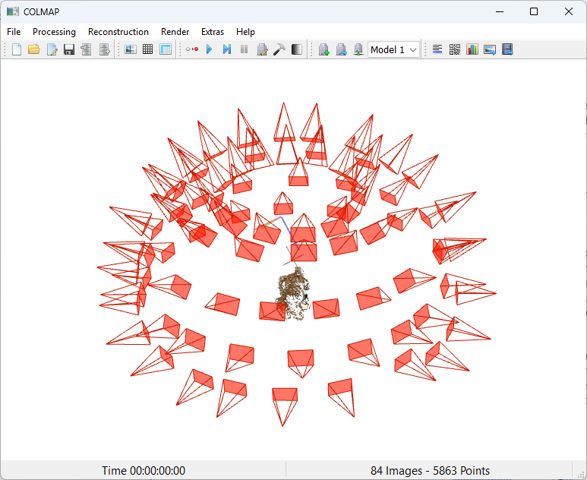
Просмотр реконструкции в COLMAP GUI
После завершения реконструкции можно посмотреть результат в COLMAP GUI:
Запустите COLMAP.
Выберите File → Import Model.
В диалоге выбора папки перейдите в %SPARSE_PATH%\0 (обычно sparse/0).
Нажмите Select Folder.
COLMAP отобразит разреженное облако точек и положения камер.
Чтобы улучшить читаемость визуализации:
Откройте Render → Render Options
Настройте Point size и Camera size
В строке статуса внизу должно быть что‑то вроде:
84 Images - 5863 Points
Это означает, что все 84 изображения были успешно зарегистрированы, и получилась разреженная реконструкция с 5 863 3D‑точками.
Рисунок 6. COLMAP GUI: разреженное облако точек и позы камер.
Опционально: запуск всего пайплайна через batch‑скрипт
Весь пайплайн COLMAP можно автоматизировать через batch‑файл. Пример .bat со всеми командами из раздела доступен здесь:
scripts/run_colmap_adjusted.bat
Перед запуском скрипта обновите пути под вашу локальную установку.
Референсные результаты
Референсный вывод COLMAP (разреженное облако точек и оценённые позы камер) доступен в репозитории датасета из примера: datasets/plush-dog.
Замечания о подборе параметров и качестве датасета
Примечание: Параметры в этом туториале выбраны так, чтобы получить надёжный результат на датасете из примера. Они не оптимизированы ни по скорости, ни по точности и не предназначены как универсальные значения «по умолчанию». Для других данных подстройте значения под цели (скорость, полнота, визуальное качество). Подбор конфигурации обычно требует нескольких итераций.
Продвинутые пользователи могут обойти внутренние этапы извлечения и сопоставления признаков в COLMAP, подставляя собственные признаки или соответствия напрямую в базу COLMAP. Это позволяет интегрировать нейросетевые пайплайны или сторонние инструменты, продолжая использовать COLMAP для мэппинга.
Иногда собрать более полный или качественный датасет эффективнее, чем подбирать параметры реконструкции. Но это не всегда возможно. Например:
Датасет может быть снят в неконтролируемых условиях
Освещение, текстура или настройки камеры могут быть не под вашим контролем
В сцене могут быть большие безтекстурные области или отражающие поверхности
В таких случаях настройка параметров становится необходимой, чтобы компенсировать ограничения входных данных.
1.4 - Обучение 3D Gaussian модели в gsplat
Чтобы обучить 3D Gaussian Splatting модель, выполните:
В примере выше обучение заняло около 12 минут на системе из раздела «Проверенная конфигурация». Итоговая модель содержит 167 459 гауссиан. Финальный .ply сохраняется в:
Откройте выведенную ссылку (например, http://localhost:8081) в браузере.
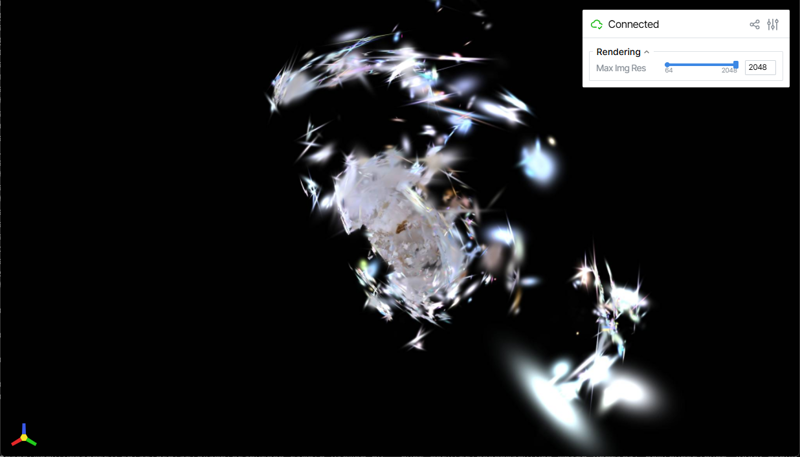
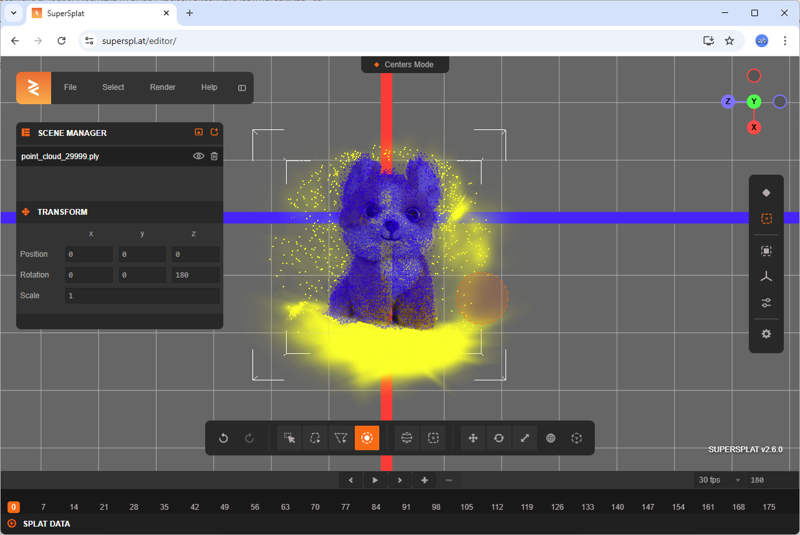
Вьювер отображает обученную Gaussian Splatting модель. Вокруг основного объекта часто появляются «плавающие» артефакты. В следующем разделе, Редактирование 3D Gaussian Splatting модели в SuperSplat, показано, как очистить и постобработать модель для более удобной визуализации или дальнейшего использования.
«Плавающие» артефакты вокруг объекта во вьювере gsplat. Обычно такие артефакты присутствуют до очистки сцены.
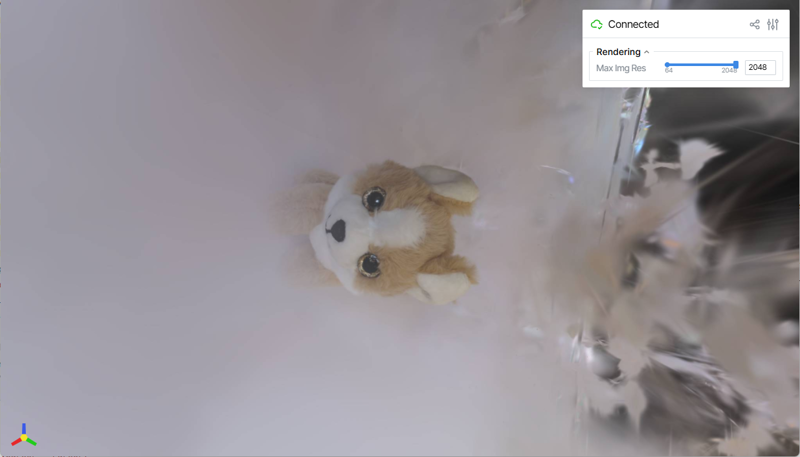
Та же сцена при приближении: реконструированная плюшевая игрушка находится в центре.
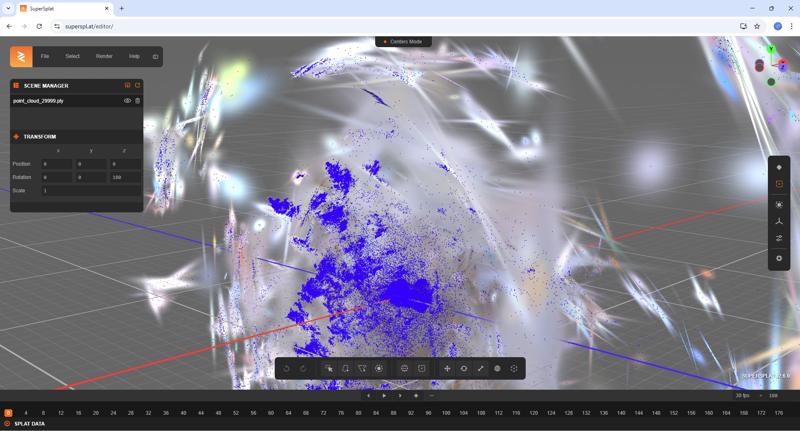
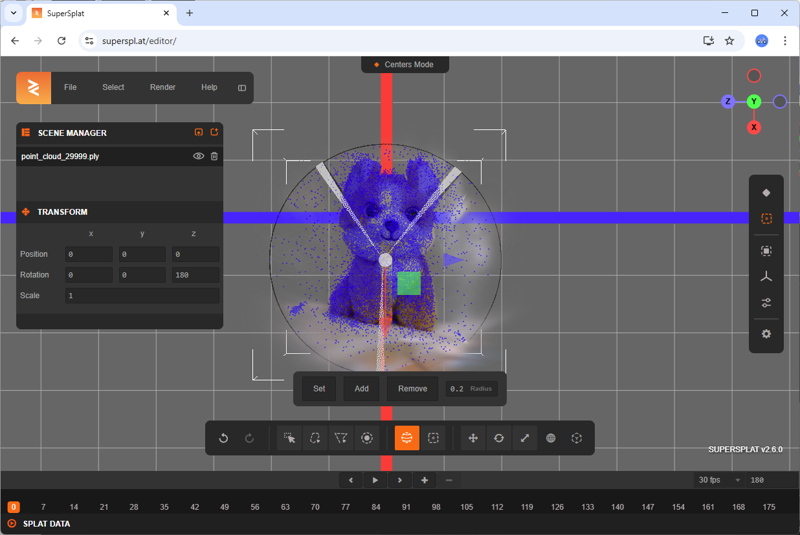
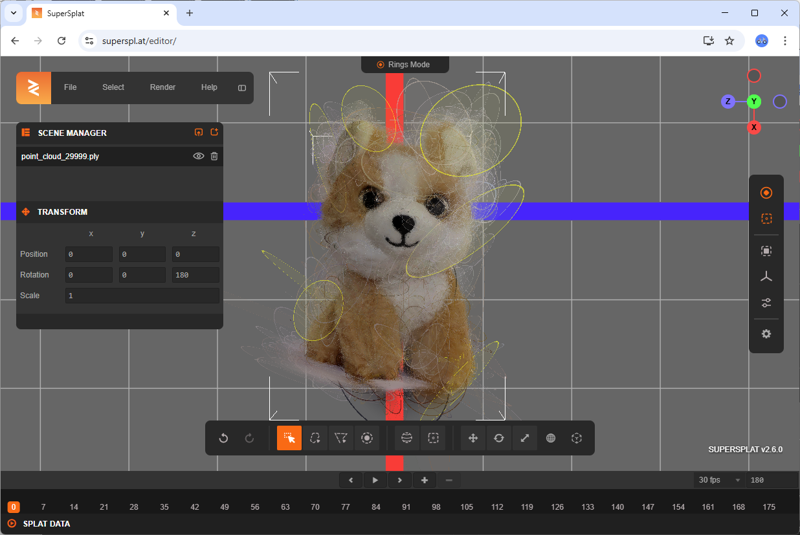
1.5 - Редактирование 3D Gaussian Splatting модели в SuperSplat
После обучения и экспорта .ply вы можете открыть модель в SuperSplat Editor для визуальной проверки и ручной доработки.
Типичные задачи редактирования:
Удаление «плавающих» артефактов и фоновых гауссиан
Обрезка модели до области интереса
Настройка внешнего вида (яркость, насыщенность, температура, прозрачность)
Применение трансформаций (масштаб, центрирование, коррекция ориентации)
Объединение нескольких моделей в одну сцену
Экспорт очищенной версии для презентаций или дальнейшего использования
Следующие рекомендации помогают повысить качество реконструкции и сделать рабочий процесс более эффективным:
Снимайте больше изображений, когда это возможно. Большие датасеты повышают устойчивость реконструкции, даже если потом требуется больше времени на обработку и очистку.
Экспериментируйте с параметрами инструментов. Настройки COLMAP и gsplat заметно влияют на результат.
Документируйте выбранные параметры. Это помогает обеспечить воспроизводимость и ускоряет последующие прогоны.
Используйте понижение разрешения (downsampling), чтобы ускорить обучение. На этапе тестов повышайте --data_factor (например, до 4), чтобы снизить потребление памяти и ускорить обучение. Для максимального качества финальные модели лучше обучать на более высоком разрешении.
Замечания по датасету из примера
Датасет для этого туториала был снят преимущественно с куполообразных ракурсов камеры, охватывающих только верхнюю полусферу объекта. В результате нижняя часть модели выглядит неполной при просмотре снизу.
Вид модели снизу: разреженные гауссианы и неполная поверхность.
Для многих сценариев (например, демонстрация на поворотном столе или фронтальная визуализация) такого покрытия достаточно.
Но для полностью замкнутых 3D‑моделей нужно снять дополнительные кадры с нижних углов.
Если объект жёсткий, можно положить его на бок, чтобы снять нижнюю часть. Убедитесь, что есть достаточное перекрытие с другими ракурсами, чтобы сохранить корректное совмещение.
Примерное время выполнения этапов
Таблица ниже показывает типичное время для каждого этапа пайплайна:
Этап
Примерное время
Съёмка изображений
20 минут
Обработка в COLMAP
1 минута
Обучение модели в gsplat
12 минут
Редактирование в SuperSplat
10 минут
Примечание: Время COLMAP указано только для успешного прогона реконструкции. Подбор параметров и повторные попытки могут добавить значительное время в зависимости от датасета.
Часто задаваемые вопросы
Примечание: Эти ответы в первую очередь относятся к съёмке объектов/«настольным» сценам, как в этом туториале. Уличные сцены и большие пространства могут требовать других инструментов, процессов и настроек.
Можно ли использовать смартфон?
Да. Хотя в туториале использовалась камера со сменной оптикой, современные смартфоны могут дать похожий результат при достаточном освещении и при условии, что кадры резкие и стабильные.
Снимать фото или видео?
Предпочтительнее фото: ими проще управлять фокусом и экспозицией. Видео тоже может работать, если снимать 60 FPS или выше и минимизировать смаз.
Сколько изображений нужно?
Для небольших объектов обычно достаточно 100–250 изображений. Для полного покрытия 360° может понадобиться больше.
Можно ли использовать зум, автофокус или автоэкспозицию?
По возможности избегайте. Используйте ручной фокус и фиксированное фокусное расстояние, чтобы внутренние параметры камеры оставались стабильными, так оценка поз получается точнее.
Нужно ли снимать объект со всех сторон?
Не всегда. Для вывода в формате «поворотного стола» часто хватает верхних и боковых ракурсов. Для полноценной 360°‑модели также снимайте нижнюю часть.
Нужна ли текстура на объекте?
Да, желательно. Поверхности с видимыми узорами, гранями и текстурой улучшают сопоставление признаков. Плоские, блестящие или безтекстурные объекты реконструировать сложнее.
Можно ли использовать текстурированный фон, чтобы помочь реконструкции?
Да, но учитывайте:
COLMAP может опираться на фон при оценке поз
Качество реконструкции самого объекта всё равно может быть ограничено
Потом может потребоваться дополнительная очистка, чтобы отделить объект